CH13 SLAM for Robotics Course - ORB-SLAM algorithm details, Pose Graph Optimization, (SIFT, ORB)
Simultaneous Localization and Mapping (SLAM) Course
In this Chapter:
- Mapping (No Uncertainty)
- Mapping (with uncertainty)
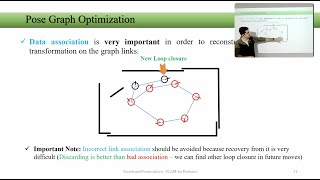
- Pose Graph Optimization
- Visual Features Extraction (SIFT, BRIEF, and ORB)
- Bundle Adjustment (BA)
- Visibility and Covisibility Graph
- ORB-SLAM (Accurate Monocular SLAM)
Aim of this chapter:
In this chapter, we focus on Visual Features Extraction algorithms and learn the fundamental elements required to know the state-of-the-art algorithm of ORB-SALM.
 2:00:55
2:00:55
 51:14
51:14
 1:11:55
1:11:55
 58:51
58:51
 1:16:35
1:16:35
 4:00:37
4:00:37
 1:54:24
1:54:24
 3:25:33
3:25:33
 27:14
27:14
 7:47:08
7:47:08
 12:42
12:42
 1:31:17
1:31:17
 1:23:12
1:23:12
 1:20:20
1:20:20
 2:29:57
2:29:57
 26:36
26:36
 37:06
37:06
 3:48:47
3:48:47
 1:05:41
1:05:41
 29:32
29:32





