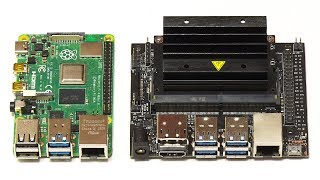
This is an in-depth tutorial of how to get VIO up and running on a Pixhawk-based drone from NXP. It's the HoverGames drone with some modifications to incorporate a Jetson Nano and Intel T265 Realsense camera for indoor vision positioning. I encourage you to review the gist I created linked below, as well as the chapters feature of YouTube to jump to various sections of this video. Please leave any comments or questions below if you're working through this setup. I'll be happy to help!
00:00 Intro
00:59 Quick VIO Position Hold Demo
01:50 Building the MAVLink Cable
01:50 Building the MAVLink Cable
03:54 Top Down View of VIO Drone
04:25 Powering Jetson Nano from Drone
05:34 3D Printed Jetson Nano Mounts
06:40 3D Printed T265 Mount
07:35 Burning Jetson Nano Image
08:47 Auterion VIO Code
09:10 VIO Gist Shortcut
09:34 ROS Melodic and Dependency Installation
11:35 Install librealsense
12:58 Install Python Catkin Tools
15:59 QGroundControl Wireless Configuration
17:34 Verify MAVLink Data Comms
18:13 Review MAVROS Launch Files
21:50 PX4 EKF2 Params for VIO
25:00 Launching VIO
25:26 Begin VIO Flight Test
25:43 VIO Altitude Flight Mode
26:03 VIO Position Flight Mode
26:39 VIO Yawing
28:20 Conclusion
VIO Gist I created to simplify the software install
https://gist.github.com/dbaldwin/041735a774bf46a82ee98bbbe28a7939
Auterion VIO Fork
https://github.com/dbaldwin/vio
Jetson Nano Mounting Blocks from Bell VRC
https://github.com/bellflight/VRC-2021-Phase-I/blob/main/3D%20Prints/STLs/jetson_blocks.STL
Jetson Nano Mount from Bell VRC
https://github.com/bellflight/VRC-2021-Phase-I/blob/main/3D%20Prints/STLs/jetson_nano_mount_cooling.STL
Intel T265 Rail Mount from Bell VRC
https://github.com/bellflight/VRC-2021-Phase-II/blob/main/3D%20Prints/t265_rail_mount.STL
Jetson Nano Wifi Antenna Mount from Bell VRC
https://github.com/bellflight/VRC-2021-Phase-II/blob/main/3D%20Prints/wifi_antenna_mount.STL

 19:24
19:24
 13:25
13:25
 7:25
7:25
 19:52
19:52
 12:42
12:42
 18:47
18:47
 18:54
18:54
 13:39
13:39
 23:35
23:35
 27:07
27:07
 18:35
18:35
 27:14
27:14
 12:53
12:53
 22:45
22:45
 22:17
22:17
 14:19
14:19
 22:39
22:39
 13:38
13:38
 14:43
14:43
 8:28
8:28





