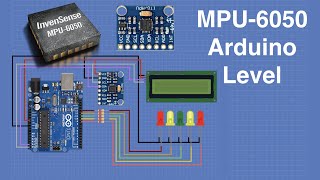
Today we will be working with the MPU-6050 IMU, and we will use it to build an electronic level with an Arduino.
Article with libraries and code - https://dronebotworkshop.com/mpu-6050-level/
More articles and tutorials: https://dronebotworkshop.com
Join the conversation on the forum: https://forum.dronebotworkshop.com
Subscribe to the newsletter and stay in touch: https://dronebotworkshop.com/subscribe/
Today we will be working with the MPU-6050, a low-cost Inertial Measurement Unit, or IMU. This device has a lot of different applications in many fields including robotics, gaming, quadcopters, and IoT devices.
The MPU-6050 has an internal gyroscope and accelerometer. It's an inexpensive device, available in several packages and modules. The module I am using is very common and has a built-0in voltage regulator so it can work with 5-volt logic.
We will start by looking at the MPU-6050 internals, as well as at the pinout of the module I am using.
Next, we will load a couple of libraries into our Arduino IDE and ruins some sample code to display Pitch, Yaw, and Roll.
After that, we will build a small project, an electronic level. Our level will display on an LCD and will also use 5 LEDs to give a good visual indication of how level the surface is.
Here are the contents for today's video:
00:00 - Introduction
02:53 - MPU-6050 Intro
11:20 - MPU-6050 Arduino Experiments
20:29 - Electronic Level
You can get the sketch and the two libraries used in the experiments on the DroneBot Workshop website.
Hope you enjoy the video!
 27:40
27:40
 13:00
13:00
 37:17
37:17
 1:07:58
1:07:58
 29:18
29:18
 25:37
25:37
 32:10
32:10
 55:34
55:34
 14:13
14:13
 10:39
10:39
 25:51
25:51
 47:27
47:27
 34:03
34:03
 22:12
22:12
 36:41
36:41
 16:03
16:03
 1:11:00
1:11:00
 16:30
16:30
 16:11
16:11
 10:28:56
10:28:56





