Nonlinear Dynamics mini-series
Part 1:
https://youtu.be/ySfs8YVMY7Q
Part 2:
https://youtu.be/I9UEBRya4X0
Part 3:
https://youtu.be/6mLCFyEv3Z0
This video shows a formal proof behind linearization for 2D flows:
dx/dt = f(x,y)
dy/dt = g(x,y)
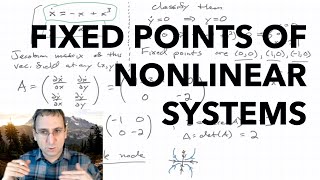
Step 1: Find fixed points. This involves solving for where dx/dt and dy/dt both are equal to 0.
Step 2: Approximate f(x,y) and g(x,y) as linear functions at these fixed points. This results in the matrix equation: d/dt X = [A] X. The matrix [A] will contain partial derivatives of f and g. The matrix [A] is also known as the jacobian matrix.
Chapters:
0:00 Intro
0:24 Fixed Points
0:44 Multivariable Taylor Series
2:06 Local Coordinate System
4:04 Limitations of Linearization
5:08 Outro
Music:
Music by Vincent Rubinetti
Download the music on Bandcamp:
https://vincerubinetti.bandcamp.com/album/the-music-of-3blue1brown
Stream the music on Spotify:
https://open.spotify.com/album/1dVyjwS8FBqXhRunaG5W5u
--
Patreon: https://www.patreon.com/VirtuallyPassed
Instagram: https://www.instagram.com/virtuallypassed/

 14:56
14:56
 23:45
23:45
 23:28
23:28
 1:13:50
1:13:50
 8:02
8:02
 27:14
27:14
 1:51:00
1:51:00
 19:34
19:34
 11:30
11:30
 13:30
13:30
 21:05
21:05
 15:38
15:38
 9:05
9:05
 27:16
27:16
 21:35
21:35
 4:00:37
4:00:37
 10:36
10:36
 14:21
14:21
 18:25
18:25
 29:08
29:08





